Πληροφορίες Εφαρμογής & Απαιτήσεις Συστήματος
Η παρούσα εφαρμογή έχει σχεδιαστεί για λειτουργία σε περιβάλλον Windows XP ή νεότερο και δεν είναι συμβατή με άλλα λειτουργικά συστήματα, όπως το Linux ή το macOS.
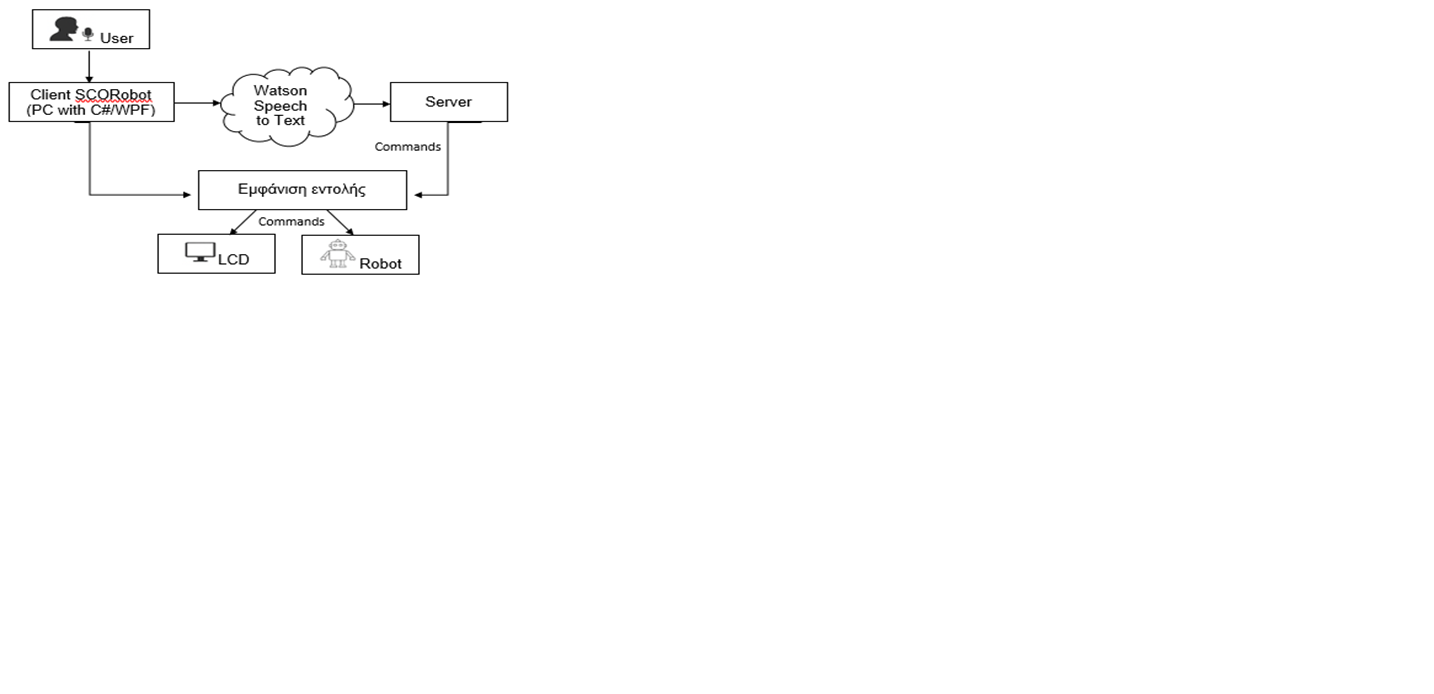
Χρησιμοποιεί το .NET Framework 4.7.2+ και το Windows Presentation Foundation (WPF) για το γραφικό περιβάλλον χρήστη (GUI).
🌐 Δικτυακές απαιτήσεις
- Απαιτείται ενεργή σύνδεση στο διαδίκτυο για επικοινωνία με τον εξυπηρετητή.
- Η επικοινωνία γίνεται μέσω RESTful API πάνω από το HTTP (port 8089).
- Η πόρτα 8089 πρέπει να είναι ανοιχτή στο τείχος προστασίας (Firewall) για εισερχόμενες και εξερχόμενες συνδέσεις.
- Ο εξυπηρετητής δεν υποστηρίζει παλαιότερα λειτουργικά όπως Windows XP.
🔌 Σειριακή Επικοινωνία
Η εφαρμογή υποστηρίζει σύνδεση με εξωτερικές συσκευές όπως:
- Arduino UNO
- Ρομποτικός βραχίονας SCORBOT ER-Vplus
Η σύνδεση γίνεται μέσω σειριακής θύρας τύπου RS-232 (COM port), φυσικής ή εικονικής (USB-to-Serial).
Απαιτείται:
- Τουλάχιστον μία διαθέσιμη σειριακή θύρα στον υπολογιστή ή κατάλληλος προσαρμογέας
- Ρυθμίσεις σύνδεσης:
9600 baud,8 data bits,no parity,1 stop bit
🎙️ Οδηγίες για φωνητική αναγνώριση
Για καλύτερη απόδοση στην αναγνώριση φωνής:
- Ο χρήστης πρέπει να εκφωνεί αργά και καθαρά
- Η σωστή προφορά των λέξεων βελτιώνει σημαντικά την ακρίβεια